
2025-11-14 04:01:46
作者:科技
分享:


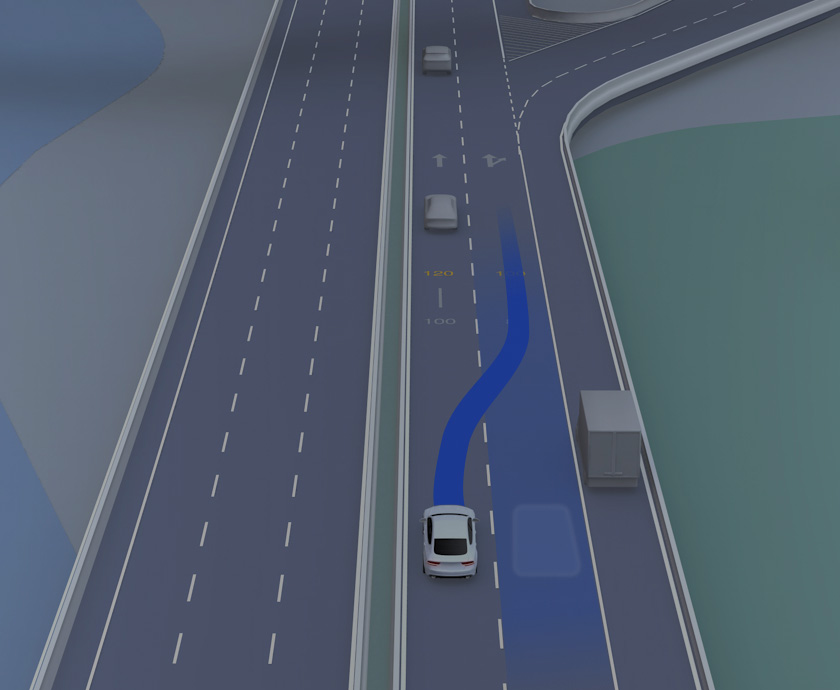
当你在导航软件上输入目的地时,普通地图可能只告诉你“前方500米右转”,但自动驾驶汽车需要的却是“第3🍁【】车道右转,避开右侧2米处的施工路障”。这种差异正是高精地图的核心价值——它以厘米级精度描绘道路细节,包含车道线曲率、坡度、限速标志甚至路缘石高度等200余种元素。2025年国内主流高精地图已实现10-20厘米的绝对定位精度,华为HiMap产品更覆盖全国300多个城市,为L3级自动驾驶提供厘米级定位支撑。

这种精度对安全至关重要。以匝道并线场景为例,传统导航地图的误差可能导致车辆压线行驶,而高精地图通🍷过车道中心线拓扑关系,能让车辆精准保持在(zài)车(chē)道(dào)中(zhōng)央。2025年武汉Robotaxi试点数据显示,搭载高精地图的车辆在复杂路口的决策准确率比纯视觉方案提升37%,这直接解释了为何2025年L3级自动驾驶新车渗透率虽达50%,但90%仍依赖高精地图——它相当于给车辆装上了“预知未来的眼睛”。
2025年的自动驾驶地图已不再是一成不变的“电子图纸”,而是能实时演算的“动态世界模型”。四维图新提出的驾驶世界模型(DWM)通过融合高精地图数据、实时传感器信息(如激光雷达点云)、车辆状态数据(速度、转向角)和外部环境数据(交通流🚀、天气),构建出物理世界的持续学习系统。在北京五环路的实测中,该模型使车辆通行效率提升28%,关键在于它能预测3秒后其他车辆的行为轨迹。
这种进化源于技术突破:3D高斯溅射技术可将2D图像重建为3D场景,理想AD Max 3.0系统通过“静态BEV+动态BEV+NeRF增强Occupancy”架构,将Occupancy网络分辨率从0.2米提升至0.1米,能识别30cm高的路缘石。更革命性的是众源更新机制——当100辆行驶中的汽车同时上报某路段新增施工围挡,云端AI可在5分钟内完成地图差分更新,这种效率是传统采集车模式的200倍。
2025年行业曾掀起“去高精地图”浪潮,但2025年的实践表明:完全无图方案就像让运动员不穿跑鞋参赛。特斯拉FSD虽通过8摄像头+AI算法实现城市导航,但在上海内环高架的测试中,遇到连续S弯道时仍需依赖车载地图的曲率数据。而“轻图”方案则找到平衡点——它只保留车道拓扑、关键路口连接等核心信息,数据量仅为全量高精地图的1/20。
零跑LEAP 3.5架构搭载的百度LD轻地图就是典型案例:通过MapTR矢量化技术,用15个关键点就能描述一条车道的几何(hé)特征,配合实时感知的动态障碍物,在杭州复杂立交场景中实现99.2%的路径规划成功率。这种“结构化先验+实时感知”的分工模式,既避免了全量地图的高昂更新成本(传统方案每公里🏀【】更新成本达千元),又解决了纯视觉方案的边缘场景失效问题——当摄像头被暴雨遮挡时,轻图仍能提供车道级定位。
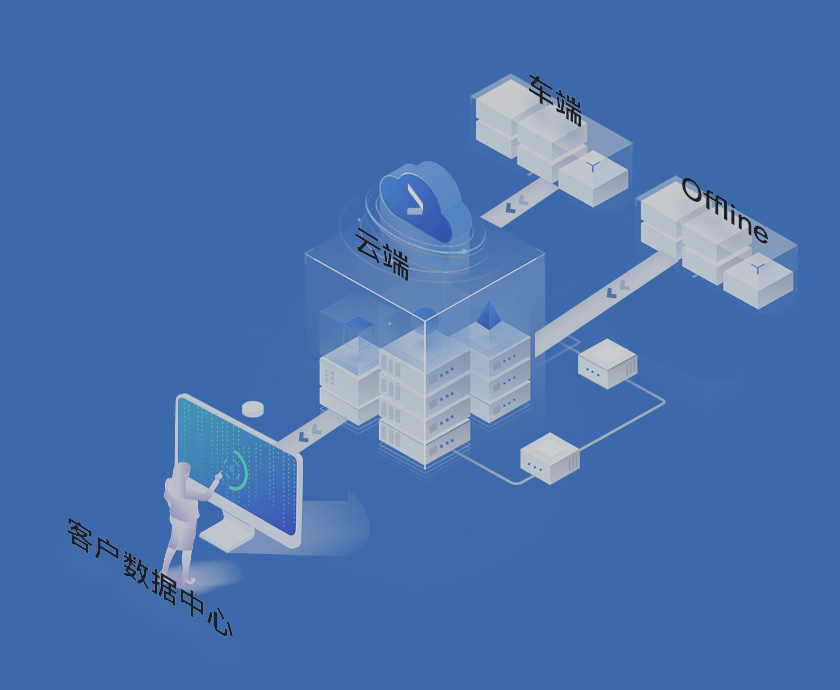
2025年的高精地图已演变为“地图即服务”(MaaS)模式。华为打造的全国高精地图聚合平台,不仅提供地图分发服务,更整合了动态数据更新、数据安全认证等12项能力。这种转变源于商业逻辑的重构:传统License授权模式难以覆盖采集成本,而云服务模式可通过订阅制实现持续盈利——百度MapAuto 6.5的SaaS服务已支撑起千万级车辆的数据闭环。
对消费者而言,最直观的体验是HMI(人机交互)的革新。高精地图数据驱动的3D车道级渲染,让仪表盘显示的车道线与实际道路完全贴合,这种“所见即所得”的信任感,使2025年用户对自动驾驶的接受度提升至73%。而车企的选型逻辑也在变化:20万以上车型倾向全量高精地图(如小鹏G9),20万以下车型则采用轻图+众包更新的组合(如五菱星光),这种分层策略正在重塑产业格局。
站在2025年的技术节点回望,高精地图的演进轨迹清晰可见:从静态数据载体到动态世界模型,从成本中心到服务生态,它始终是自动驾驶不可或缺的“数字底座”。当我们在北京亦庄体验Robotaxi时,车辆在施工路段精准避让的背后,是每秒处理10GB地图数据的云端大脑;当特斯拉FSD在美国乡村道路行驶时,其视觉地图匹配算法仍需参考稀疏高精地图的拓扑关系。这些案例印证了一个真理:在自动驾驶的终极目标——零事故、全场景、无干预的出行体验面前,高精地图的“高精”二字,永远有着不可替代的价值。













 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



