
2025-11-14 00:01:48
作者:科技
分享:


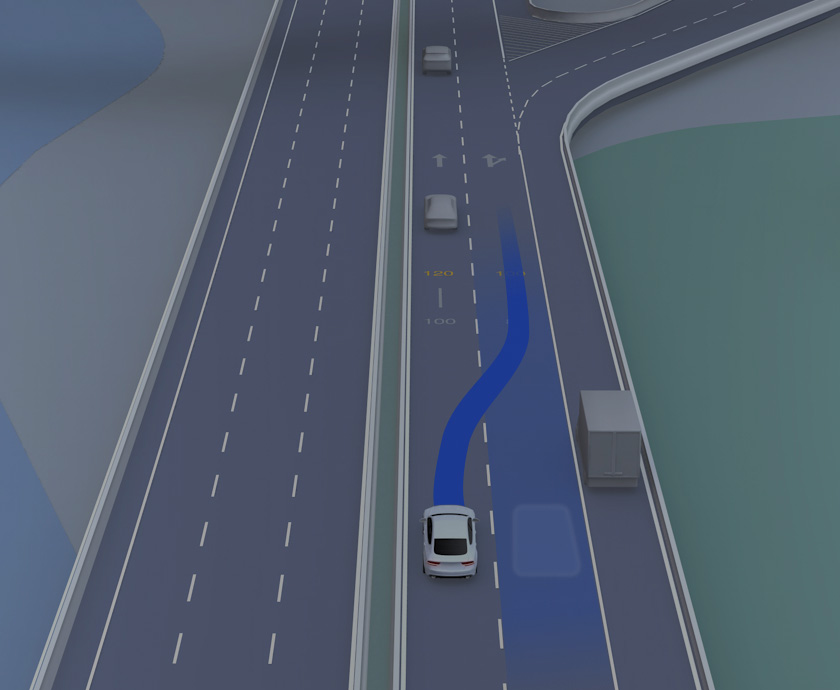
过去,自动驾驶地图是“静态的导航工具”,像一本精准的纸质地图,标注着车道线、交通标志的厘米级坐标。但如今,随着“无图NOA”(不依赖离线高精地图的导航辅助驾驶)成为主流,地图正从“记录过去”转向“预演未来”。2025年,四维图新提出的“驾驶世界模型”(DWM)概念引发行业热议——它通过融合摄像头、激光雷达、车辆状态数据(如速度、转向)以及交通流、天气等实时信息,构建一个能预测未来3🍀中国-5秒场景变化的“虚拟驾驶舱”。例如,在北京市五环路的实测中,搭载DWM的车辆通行效率提升了28%,能提前预判“鬼探头”行人或施工区动态变化,像人类驾驶员一样“眼观六路”。

🍭这种转变的背后,是算法从“规则驱动”到“数据驱动”的革命。传统高精地图依赖人工标注规则处理环境,而DWM通过自监督学习从海量驾驶数据中提取时空规律,实现“理解-预测-规划”三位一体。举个例子,当车辆驶入十字路口时,DWM不仅能识别红绿灯状态,还能结合周围车辆的行驶轨迹,预测3秒后是否会有车辆加塞,并提前调整车速。这种能力,让自动驾驶从“机械执行指令”进化为“有预判的智能体”。
2025年,NeRF(神经辐射场)技术成为自动驾驶地图领域的“黑马”。它像一位“数字雕塑家”,能将2D摄像头拍摄的图像转化为高精度的3D场景,甚至能合成暴雨、浓雾等极端天气下的虚拟路况,用于训练自动驾驶系统。理想汽车的AD Max 3.0系统已率先量产这一技术:通过“静态BEV+动态BEV+NeRF增强Occupancy”的三重感知架构,车辆在远距离(如200米外)的感知分辨率从0.2米提升至0.1米,能精准识别30厘米高的路缘石和5厘米直径的井盖。
更关键的是,🚨中国NeRF技术大幅降低了地图制作成本。传统高精地图依赖激光雷达采集车,单台设备成本超百万元,且需专业团队标注数据;而NeRF仅需普通摄像头拍摄的图像,通过AI算法即可生成3D地图,成本直降90%。小鹏、奔驰、理想等车企已将NeRF技术量产落地,特斯拉、宝马则通过技术合作探索更深层应用。一位自动驾驶工程师向我透露:“NeRF的潜力在于‘无中生有’——即使某条道路从未被采集过,只要有几张手机拍摄的照片,就能还原出接近真实的3D场景,这对农村、山区等地图覆盖盲区是革命性的突破。”
2025-2025年,随着“无图NOA”兴起,轻量化地图(LD MAP)成为行业焦点。它不再追求“全量数据”,而是像智能手机一样“按需加载”——只传输车辆当前路段所需的车道线、交通标志等拓扑和语义信息,数据量比传统高精地图减少80%。百度MapAuto 6.5地图的LD模式已实现这一目标:通过BEV静态道路场景重建技术,结合MapTR(类似华中科大的Instance Query检测道路元素)和VectorMapNet(类似清华的Auto-regressive decoder输出拓扑关系),在硬件资源受限的嵌入式平台上也能实时建图。
这种轻量化设计的价值在于“普惠性”。过去,高精地图因数据量大、更新慢,主要服务于30万元以上的高端车型;而LD MAP的成本仅为其1/5,能让15万元级的车型也具备城市NOA能力。零跑汽车2025年发布的LEAP 3.5技术架构,就搭载了百度LD地图数据,在杭州的复杂城市场景中实现了98.7%的BEV几何一致性(n⚽️uScenes数据集测试)。一位车企产品经理告诉我:“轻量化地图不是‘减配’,而是‘精准供给’——就像你不需要背着整个图书馆上路,只需要一本能随时更新的电子词典。”
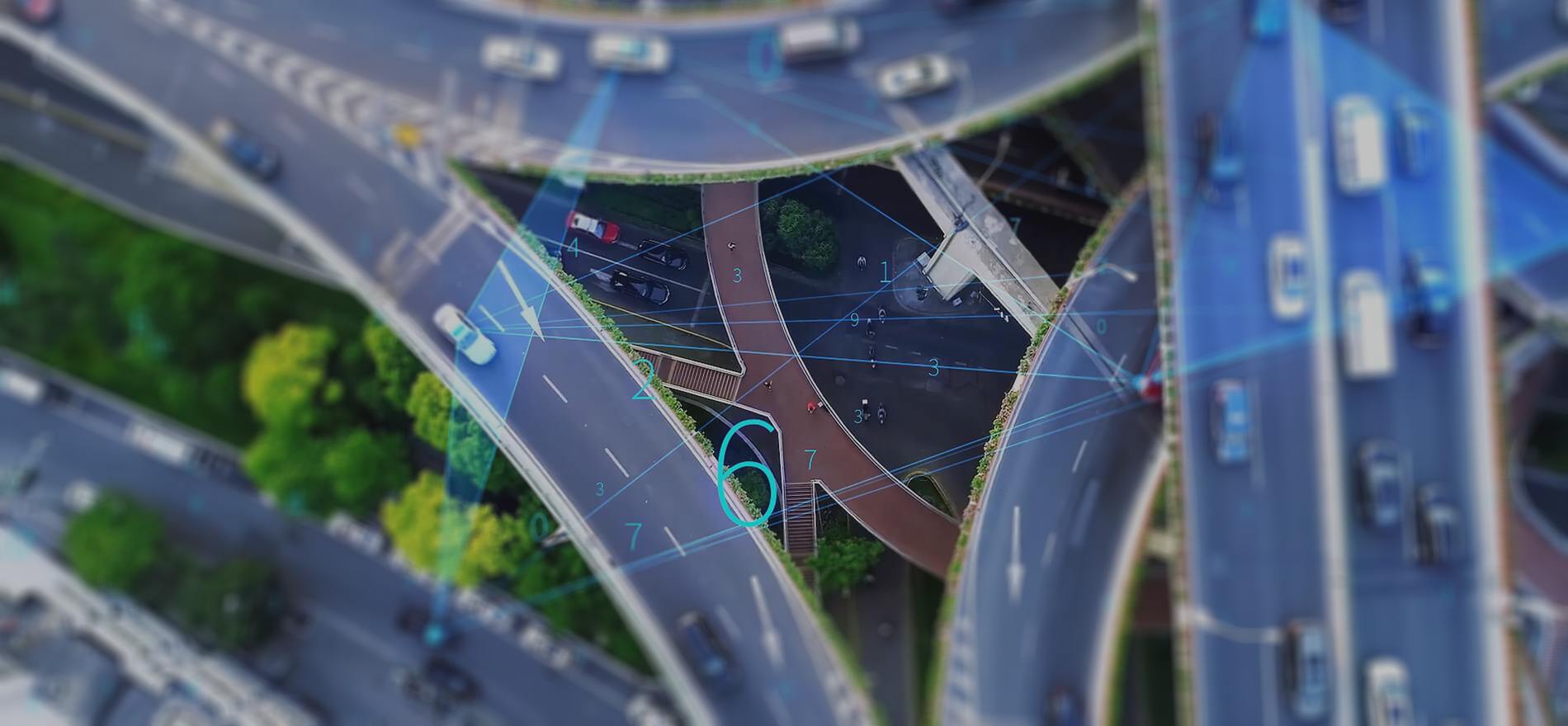
自动驾驶的终极目标不是“单个车辆的聪明”,而是“整个交通系统的智慧”。2025年,车路协同(V2X)技术与自动驾驶地图的融合成为新趋势。通过路侧单元(RSU)实时传输交通信号灯状态、前方事故预警等信息,地图能动态调整路径规划,减少对高精地图的依赖。例如,在武汉的自动驾驶示范区,搭载V2X的车辆在遇到前方施工时,能提前300米收到路侧单元的预警,结合地图数据重新规划路线,避免急刹或绕路。
这种“群体智慧”的价值在Robotaxi(自动驾驶出租车)场景中尤为明显。百度萝卜快跑在武汉的运营数据显示,V2X技术使车辆在复杂城市场景中的接管率降低了40%,单日订单量从2025年的500单提升至2025年的2025单。一位交通专家指出:“未来的自动驾驶地图,不仅是车辆的‘眼睛’,更是交通系统的‘神经中枢’——它连接着每一辆车、每一个路侧单元,甚至每一盏红绿灯,让整个城市交通像‘蜂群’一样高效协作。”
自动驾驶地图的未来,是一场从“静态记录”到“动态预演”、从“单车感知”到“群体协同”的革命。NeRF技术让地图“无中生有”,轻量化设计让技术“普惠大众”,世界模型让车辆“未卜先知”,车路协同让交通“群体智慧”。这些趋势背后,是AI、传感器、通信技术的深度融合,更是对“安全、高效、普惠”出行需求的回应。正如一位自动驾驶工程师所说:“未来的地图,不是画在纸上的线,而是(shì)刻(kè)在(zài)数(shù)字(zì)世(shì)界(jiè)里(lǐ)的(de)‘交(jiāo)通(tōng)基(jī)因(yīn)’——它(tā)让(ràng)每(měi)一(yī)辆(liàng)车(chē)都(dōu)成(chéng)为(wèi)交(jiāo)通(tōng)系(xì)统(tǒng)的(de)有(yǒu)机(jī)部(bù)分(fēn),共(gòng)同(tóng)编(biān)织(zhī)一(yī)张(zhāng)更(gèng)智(zhì)能(néng)、更(gèng)安(ān)全的(de)出(chū)行(xíng)网(wǎng)络(luò)。”













 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



