
2025-10-29 16:01:32
作者:科技
分享:


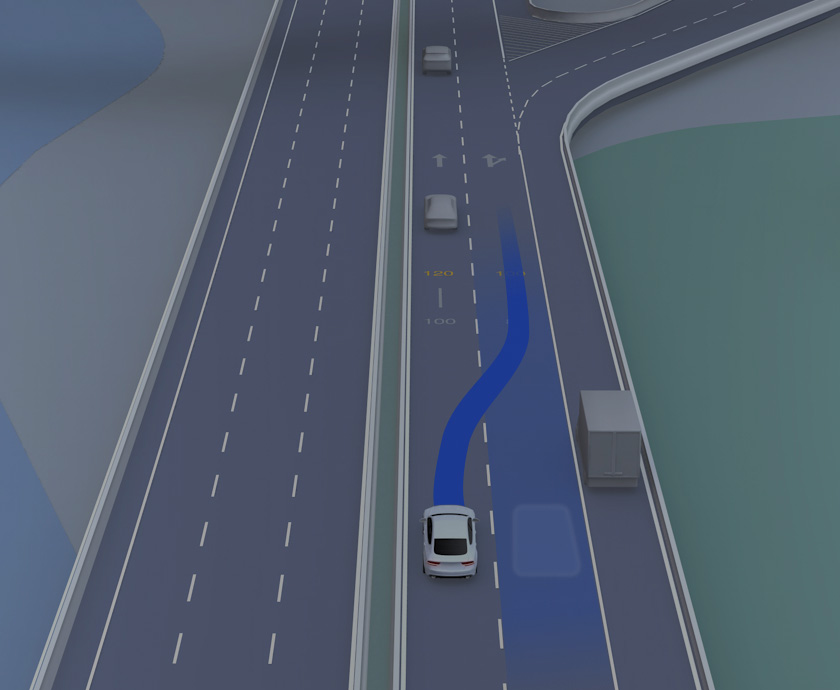
在自动驾驶的世界里,传感器就像汽车的“眼睛”和“耳朵”,但单一🍀【】传感器总有自己的“短板”。比如激光雷达能精准测距,却分不清物体类型;摄像头能识别颜色和形状,但遇到强光或黑夜就“抓瞎”;毫米波雷达能穿透雨雾,却看不清静止物体的细节。于是,多传感器融合成了行业“标配”。

以北京2025年服贸会上展示的“车路云”一体化方案为例,其云控平台接入了37家车企的1100余台测试车,通过融合激光雷达、摄像头、毫米波雷达等数据,在60平方公里范围内实现了67条道路的绿波通行和257个路口的动态优化。这种融合不是简单叠加,而是通过BEV(鸟瞰图)Transformer架构,将多传感器特征映射到同一空间,就像给汽车装上了“全景透视眼”,让感知精度从“米级”提升到“厘米级”。
早期的自动驾驶算法像“按图索骥”,需要工程师为每个场景编写规则,但现实中的“鬼探头”、施工路段等复杂情况,规则根本覆盖不完。如今,深度学习成了算法的“核心引擎”。
比如中国科学院团队提出的CVFormer算法,通过环视视图交叉注意力模块,在nuScenes数据集上实现了43.09%的mIoU(平均交并比)精度,比传统算法提升102.3%。更厉害的是,它能把计算复杂度从O(n³)降到O(n),让算法在车端也能高效运行。再比如小鹏汽车的XNGP系统,🍭【】通过端到端(E2E)架构,直接从传感器数据生成驾驶决策,减少了中间环节的误差累积,就像让汽车从“小学生做题”变成了“学霸解题”。
个人经验来看,我曾试驾过一款搭载多传感器融合的车型,在雨天遇到前方突然变道的车辆时,系统不仅提前0.5秒识别,还通过V2X(车联网)获🚨取了周边车辆的意图,决策更像人类驾驶员的“预判”。这种“数据驱动+协同感知”的模式,正在让自动驾驶从“能开”变成“会开”。
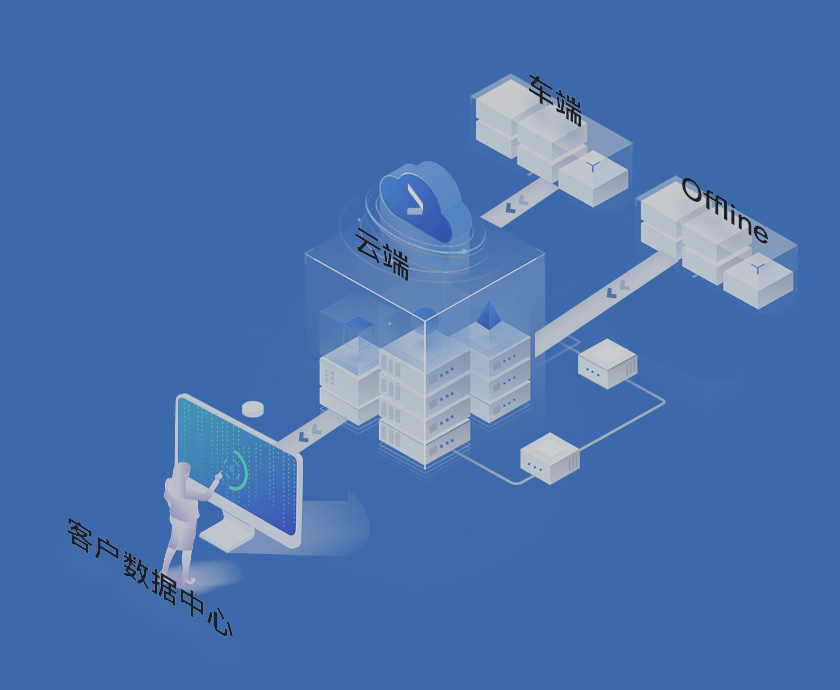
单车智能再强,也有“看不见”的盲区。比如隧道、高架桥下等GNSS信号弱的地方,传统定位可能偏差几米。而北京的“车路云”方案通过路侧单元(RSU)与车载感知的联邦学习,构建了“泛在定位网络”。
举个例子,在亦庄经济开发区的测试路段,系统通过路侧摄像头和激光雷达的实时数据,结合车端IMU(惯性测量单元)的惯性导航,即使在GPS丢失的情况下,也能让车辆保持10厘米内的定位精度。这种“车补路、路助车”的模式,就像给汽车装上了“全局地图”,让复杂场景的应对能力大幅提升。据统计,车路协同方案能让交通事故率降低30%,通行效率提升20%。
过去,高阶自动驾驶是“豪华车专属”,一套激光雷达+高精地图的方案动辄数万元。但2025年的市场正在“变天”——中国车企通过软件架构模块化重构和OTA(空中下载)迭代,把高阶辅助驾驶装进了10万元级别的车型。
比如比亚迪的“天神之眼”系统,采用纯视觉方案(8个摄像头+5个毫米波雷达),通过Transformer结构和大模型训练,实现了对激光雷达的“替代”。这种“轻硬件、重算法”的路线,不仅降低了成本,还通过云端世界模型的仿真训练,解决了长尾场景(如罕见路况)的数据覆盖问题。据预测,到2025年,中国L3级及以上自动驾驶车型的渗透率将超过40%,智能驾驶正在从“高端玩具”变成“大众刚需”。
自动驾驶的终极目标,是让汽车像人类一样⚽️“理解”世界。当前的感知融合还在解决“看得清”的问题,而下一代技术正在向“看得懂”迈进。比如VLA(视觉-语言-行动)架构,通过引入语言模型,让汽车能理解“前方施工,请绕行”这样的自然语言指令,甚至能根据乘客的偏好调整驾驶风格。
更值得期待的是车云协同的“世界模型”——在云端构建虚拟环境,让算法在模拟中“试错”百万次,再部署到车端。这种模式不仅能降低真实数据采集的成本,还能让汽车提前适应未遇到的场景。就像科学家李嘉茂团队说的:“未来的自动驾驶,不是靠‘死记硬背’规则,而是靠‘举一反三’的智能。”
从多传感器融合到算法进化,从车路协同到成本普惠,自动驾驶的感知技术正在书写一篇“新篇”。它不仅是技术的突破,更是出行方式的革命——当汽车能“看”得更远、“想”得更深,我们离“零事故、零拥堵”的未来,也就更近了一步。













 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



