
2025-10-29 12:01:32
作者:科技
分享:


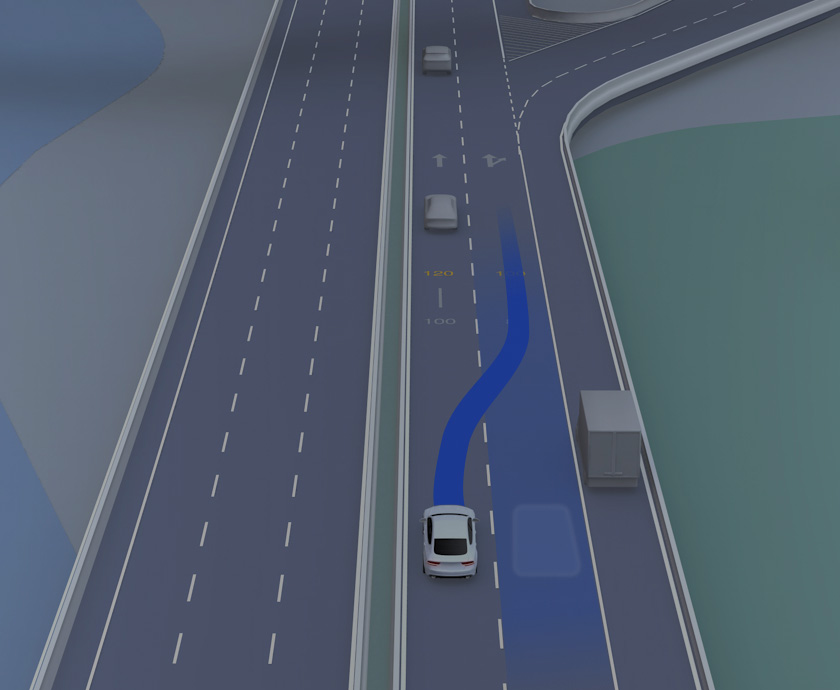
2025年9月,理想汽车宣布VLA(视觉-语言-行动)大模型全量推送,这标志着自动驾驶从“规则驱动”迈🌵官网入“类人思维”时代。传统辅助驾驶依赖预设规则,面对环岛、潮汐车道等长尾场景时,接管率居高不下。而VLA通过统一视觉、语言与行动智能,实现了对复杂场景的逻辑推理。例如,用户只需说“这段路慢点”,系统就能结合导航信息调整车速,甚至在黑夜以120km/h时速识别两台事故车并连续避让——这种能力源于3D高斯自监督训练和稀疏化LLM基座模型的融合,让系统具备3D空间理解能力。理想汽车的数据显示,VLA部署后辅助驾驶每日使用率提升3倍,累计里程渗透率提升2.2倍,用户单日最长行驶里程突破770公里,验证了“类人驾驶”的实用性。

自动驾驶的进化离不开硬件支撑。理想AD Max平台搭载的NVIDIA Thor-U芯片算力达700TOPS,较前代提升300%,支撑VLA在仿真与强化学习中的高效训练。而AD Pro平台则通过“激光雷达+800万像素长焦摄像头”的组合,实现了全天候感知能力:激光雷达探测灵敏度提升130%,体积缩小60%,可在黑夜识别200米外的障碍物;长焦摄像头则让系统提前180米感知红绿灯,过路口时决策更从容。更值得关注的是,理想自研智驾芯片已进入车载测试阶段,预计2025年部署于旗舰🍬车型。这款芯片在运行大语言模型时性能是市场顶尖芯片的2倍,运行视觉模型时性能达3倍,将进一步降低对外部供应商的依赖。这种“硬件超配”策略,让理想在15万-50万元价格区间内,构建了从AD Pro到AD Max的全场景技术护城河。
自动驾驶的终极竞争是数据战争。截至2025年8月,理想用户辅助驾驶总里程达49亿公里,较去年同期增加27亿公里。这些数据通过“世界模型”生成仿真场景,既可复现极端工况,又能创造新测试环境,将验证周期缩短70%。例如,理想通过“超级对齐”方法,用10%的生成数据弥补模仿学习在逻辑推理上的不足,使模型在7个月内将接管里程(MPI🧩官网)从12公里提升至130公里。更关键的是,理想构建了“真实数据+生成数据”的混合训练体系:真实采集数据占比90%,生成数据占比10%,但后者能针对性补强长尾场景。这种策略让理想在2025年Q2财报中宣布,预计2025年MPI将突破1000公里,向L4级自动驾驶迈出关键一步。
自动驾驶的安全边界正在被重新定义。理想AD Pro平台新增的“360°AEB安全盾”覆盖低速、异形障碍物、路口转弯等场景,全速域AEB激活区间扩展至0-130km/h,AES(自动紧急避让)触发速度提升至130km/h。更突破性的是“二次碰撞预警(SCM)”功能:当AEB触发后,若车速仍大于30km/h,系统会自动激活SCM避免二次事故。这些功能背后是“超级对齐”技术的支撑——通过行为对齐、法律常规对齐、技术安全对齐四个维度,确保辅助驾驶符合人类价值观。例如,在高速场景中,系统会优先驶入快速车道、超越大车时增加避让幅度;城市场景中,遇到遮挡路口会提前减速,避免“鬼探头”风险。数据显示,理想的安全技术已预防超415万起潜在事故,其中烈性事故超1000起,将“零事故”从理想变为可能。
理想汽车董事长李想在2025年AI Talk中提出:“自动驾驶是空间智能,大语言模型是认知智能,两者的融合将创造更🔰大价值。”这种理念在VLA大模型中已初见端倪:用户可通过自然语言调整驾驶风格,系统能结合导航信息优化路线,甚至预测其他交通参与者的行为。而理想同学的进化更印证了这一趋势——从车机进入手机的Mind GPT,已能识别菜单、画作、动植物等上千种物品,成为家庭通用智能助手。当汽车从交通工具进化为“空间机器人”,理想正在探索的不仅是技术突破,更是一场关于“人-车-环境”关系的革命。正如李想所言:“我们要做的不是汽车的智能化,而是人工智能的汽车化。”这场革命,或许才刚刚开始。













 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



