
2025-12-01 04:01:46
作者:科技
分享:


在科技飞速发展的当下,无人驾驶与深度学习作为两大前沿领域,正以前所未有的态势改变着我们的生活与未来。深度学习凭借其强大的数据处理与🌲中国模式识别能力,为无人驾驶技术带来了革命性的突破,从环境感知到决策规划,深度学习在无人驾驶的各个环节都发挥着关键作用。本文将深入探讨深度学习在无人驾驶领域的具体应用、如何开启深度学习之旅、深度学习与自动驾驶的结合方式,以及自动驾驶汽车能否运用深度学习进行决策等关键问题,带您一同领略这一科技融合的魅力与潜力。

1. 深度学习赋予了计算机对图像深度解析与理解的能力,这一专业领域被称之为图像语义分割。它能够精准地辨识图像中的各类物体,并勾勒出物体的大致轮廓与边缘等关键属性。以FCN全卷积神经网络为例,便是这一技术的杰出代表。而当深度学习(xí)拓(tà)展(zhǎn)至(zhì)视(shì)频(pín)领(lǐng)域,其(qí)物(wù)体(tǐ)分(fēn)割(gē)技(jì)术(shù)同(tóng)样(yàng)展(zhǎn)现(xiàn)出(chū)非(fēi)凡(fán)的(de)实(shí)力(lì),其(qí)核(hé)心(xīn)功(gōng)能(néng)与(yǔ)图(tú)像(xiàng)分(fēn)割(gē)异(yì)曲(qū)同(tóng)工(gōng),但(dàn)视频处理的优势在于能够巧妙利用多帧图像中运动物体的视差信息,进行更为精准、细致的判断与处理,犹如在夜空中捕捉星辰的微妙移动。
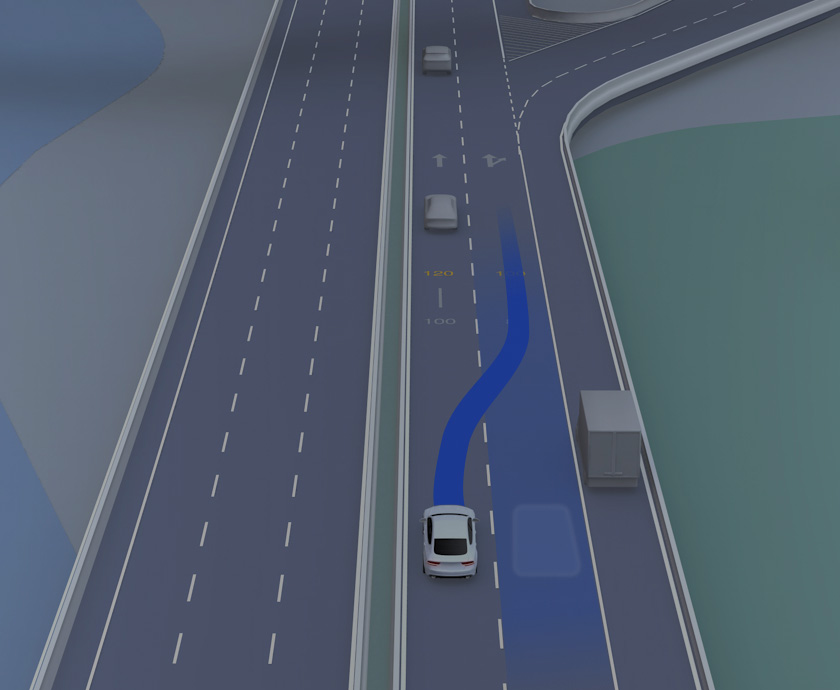
2. 在环境识别领域,Mobileye将识别任务精细划分为三大核心板块:物体识别、可行驶区域检测以及行驶路径识别。这一划分不仅体现了技术的高度专业化,更为自动驾驶等前沿应用提供了坚实的技术支撑。
3. 深度学习,作为机器学习领域的一颗璀璨明珠,已广泛渗透至各行各业,引领着技术革新的浪潮。在无人驾驶汽车这一前沿领域,深度学习更是大放异彩,尤其在图像处理方面展现出非凡的实力。它不仅能够精准感知周围环境,实现可行驶区域的智能检测,还能高效识别行驶路径,为无人驾驶汽车的安全、稳定行驶提供强有力的技术保障。
1. 开启深度学习之旅,可以遵循以下步骤:学习基础知识:首先,你需要掌握深度学习的基础知识,包括机器学习、线性代数、带压伟概率论和统计学等。这些知识是理解深度学习算法和模🌽型的基础。学习深度学习立属框架:接着,你(nǐ)可(kě)以(yǐ)学(xué)习(xí)一(yī)些(xiē)流(liú)行(xíng)的(de)深(shēn)度(dù)学(xué)习(xí)框(kuāng)架(jià),如(rú)TensorFlow、PyTorch等(děng)。
2. 进(jìn)行(xíng)深(shēn)度(dù)学(xué)习(xí)可(kě)以(yǐ)通(tōng)过(guò)以(yǐ)下(xià)几(jǐ)个(gè)步(bù)骤(zhòu):选(xuǎn)择(zé)感(gǎn)兴(xìng)趣(qù)的(de)方(fāng)向(xiàng):将(jiāng)深(shēn)度(dù)学(xué)习(xí)与(yǔ)自(zì)己(jǐ)的(de)专(zhuān)业(yè)、学校的优势学科相结合。 阅读专业领域内的经典教材:系统学习理论知识,并且要勤动手实践。 观看公开课:在网络上看一些经典的公开课,更加形象的理解深度学习。
3. 以下是深度学习入门的步骤:数学基础:深🎲度学习需要一些数学基础,包括线性代数、微积分、概率论和统计学。这些都是理解深度学习算法背后的原理的关键。
1. 递归神经网络(RNNs)作为处理序列数据的利器,无疑是当前诸多复杂问题中的最优解之一。而深入探索RNNs的奥秘,斯坦福大学提供的课程讲义视频堪称不二之选,其详尽的讲解与实战案例,为学习者铺设了一条通往精通的捷径。此外,借助Tensorflow这一强大的开源深度学习框架,您不仅能够轻松搭建起RNNs模型,还能在实践中不断精进,深化理解。随着学习的深入,您将具备足够的能力,去勇敢💰中国地挑战并解决一系列深度学习领域的难题,从精准的人脸检测到前沿的自动驾驶语音识别,每一个领域都等待着您的智慧去开拓与征服。
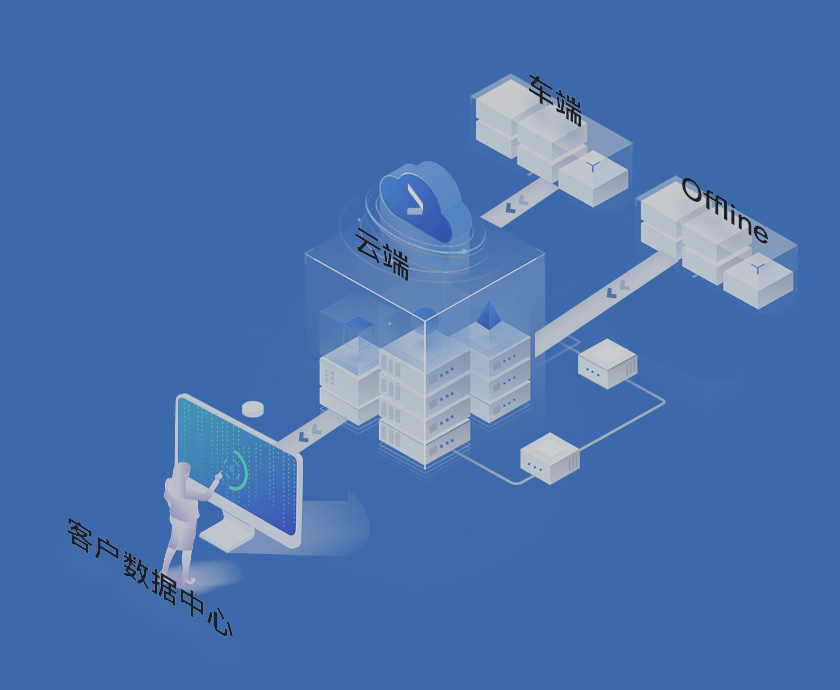
2. 将深度学习与自动驾驶技术深度融合,是推动未来交通革命的关键一步。要实现这一目标,首要任务是构建一个全面而丰富的数据集。这要求我们广泛收集涵盖各种驾驶场景的数据,包括但不限于城市街道的错综复杂、高速公路的疾驰畅行、乡村小路的宁静悠远,以及不同天气条件下的能见度变化、光照强度的昼夜更迭等。这些数据如同自动驾驶系统的“眼睛”和“大脑”,为其提供着判断与决策的依据。
3. 深度学习技术赋予了计算机对图像深刻理解的能力,这一过程在专业领域被称为图像语义分割。它能够精准(zhǔn)地(de)识(shi)别(bié)出(chū)图(tú)像(xiàng)中(zhōng)的(de)每(měi)一(yī)个(gè)物(wù)体(tǐ),勾(gōu)勒(lēi)出(chū)物(wù)体(tǐ)的(de)大(dà)致(zhì)轮(lún)廓(kuò)与(yǔ)边(biān)缘(yuán),仿(fǎng)佛(fú)为(wèi)图(tú)像(xiàng)披(pī)上(shàng)了(le)一(yī)层(céng)智(zhì)慧(huì)的(de)外(wài)衣(yī)。FCN全卷(juǎn)积(jī)神(shén)经(jīng)网(wǎng)络(luò)便(biàn)是(shì)这(zhè)一(yī)领(lǐng)域的(de)杰(jié)出(chū)代(dài)表(biǎo),它(tā)以(yǐ)卓(zhuō)越(yuè)的(de)性(xìng)能(néng)在(zài)物(wù)体(tǐ)分(fēn)割(gē)任(rèn)务(wu)中(zhōng)大(dà)放(fàng)异(yì)彩(cǎi)。当(dāng)然(rán),深(shēn)度(dù)学(xué)习(xí)在(zài)物(wù)体(tǐ)分(fēn)割(gē)方(fāng)面(miàn)的(de)应(yīng)用(yòng)远(yuǎn)不(bù)止(zhǐ)于(yú)此(cǐ),众(zhòng)多(duō)技(jì)术(shù)虽(suī)功(gōng)能(néng)相(xiāng)似(shì),却各有千秋。其中,一些技术巧妙地利用多帧图像中运动物体的视差信息,进行更为精确的判断与识别,为自动驾驶等应用场景提供了更为可靠的技术支撑。
1. 深度学习将计算机得到的图像进行理解。专业词语叫图像语义分割。区分出哪里是什么物专体,物体的大致边缘(yuán)等(děng)属(shǔ)。例(lì)如(rú)FCN全卷(juǎn)积(jī)神(shén)经(jīng)网(wǎng)络(luò)。 深(shēn)度(dù)学(xué)习(xí)应(yīng)用(yòng)于(yú)视(shì)频(pín)的(de)物(wù)体(tǐ)分(fēn)割(gē)技(jì)术(shù)也(yě)有(yǒu)一(yī)些(xiē),大(dà)致(zhì)功(gōng)能(néng)是(shì)一(yī)样(yàng)的(de)。只(zhǐ)是(shì)视(shì)频(pín)可(kě)以(yǐ)利(lì)用(yòng)多(duō)帧(zhèng)图(tú)像(xiàng)运(yùn)动(dòng)物(wù)体(tǐ)的(de)视(shì)差进行额外的判断。
2. 也可以使用深假降营次班油数误系度学习处理激光雷达数据,进行障碍物检测和环境建模。决策与规划:深度学习还可以用于决策和路径规划。例如,使用强化学习... 以确保自动驾驶汽车能够在各种复杂的交通场景中安全、高效地运行。持续迭代与优化:基于测试结果不断优化深度学习模型和算法。
3. 环境识别方面,mobileye把他们识别方面的工作主要分为三部分,物体识别,可行驶区域检测,行驶路径识别。
综上所述,深度学习与无人驾驶的深度融合已成为推动交通领域变革的强大动力。深度学习在无人驾驶的环境识别、决策规划等方面展现出了卓越的性能与巨大的潜力,为无人驾驶汽车的安全、稳定行驶提供了坚实的技术保障。同时,开启深度学习之旅也并非遥不可及,通过系统学习基础知识、掌握流行框架、结合专业方向实践,我们能够逐步踏入这一充满挑战与机遇的领域。未来,随着技术的不断进步与创新,深度学习与无人驾驶必将创造出更加智能、便捷、安全的交通新生态,让我们共同期待这一美好愿景的早日实现。













 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



