
2025-11-20 20:01:32
作者:科技
分享:


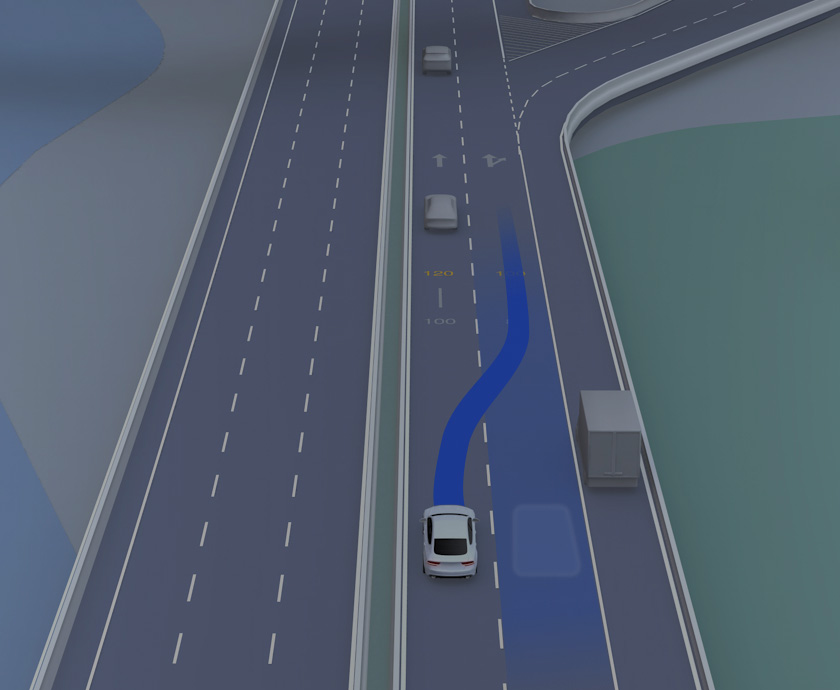
2025年10月,特斯拉向海外车主推送FSD Beta版本时,系统还像刚学走路的婴儿——只能识别车道线、控制车距,连路口转弯都要车(chē)主提(tí)前(qián)接(jiē)管(guǎn)。但(dàn)五(wǔ)年(nián)后(hòu)的(de)今(jīn)天(tiān),这(zhè)套(tào)系(xì)统(tǒng)已(yǐ)能(néng)独(dú)立(lì)完(wán)成(chéng)从(cóng)停(tíng)车(chē)场(chǎng)启(qǐ)动(dòng)到(dào)跨(kuà)城(chéng)通(tōng)勤(qín)的(de)全流(liú)程(chéng)。背(bèi)后(hòu)的(de)秘(mì)密(mì)藏(cáng)在(zài)特(tè)斯(sī)拉(lā)的(de)“数(shù)据(jù)炼(liàn)金(jīn)术(shù)”里(lǐ):全球150万辆特斯拉车辆每天上传超100万段驾驶视频,相当于每天积累500年人类驾驶时长。这些数据通过Dojo超算中心处理,其算力达81.6 petaflops,能同时训练3000个神经网络模型。举个例子,FSD v13.2版本通过分析暴雨中车辆行驶轨迹,学会了在车辙积水覆盖车道线时,依然能保持车道居中行驶🌸网址——这项能力在2025年德国暴雨测试中,让特斯拉Model S完成了6公里无接管驾驶。

更值得关注的是特斯拉的“影子模式”:当车主手动驾驶时,系统会在后台模拟AI决策,对比人类操作与算法差异。这种“隐形训练”已累计修正超200亿次操作逻辑。就像2025年6月那辆从德州工厂自动驾驶交付的Model Y,它行驶的15英里路程中,系统在后台完成了127次潜在决策优化。这种数据闭环🥔让FSD的决策延迟从早期的1.2秒缩短至0.3秒,接近人类驾驶员的0.25秒反应时间。
当Waymo的无人车顶着激光雷达“帽子”在旧金山测试时,特斯拉却坚持用8颗摄像头“裸眼”闯荡江湖。🎷这种选择在2025年引发了激烈争论:支持者认为摄像头成本仅激光雷达的1/20,且能通过神经网络学习人类视觉逻辑;反对者则指出,摄像头在逆光、浓雾等场景下存在致命盲区。2025年10月进博会上,特斯拉Cybercab的展示视频就暴露了问题:车辆在识别交警手势时出现误判,导致交通堵塞。更尴尬的是,奥斯汀警方发现无法对无人驾驶车辆开罚单——系统根本不理解警察的停车手势。
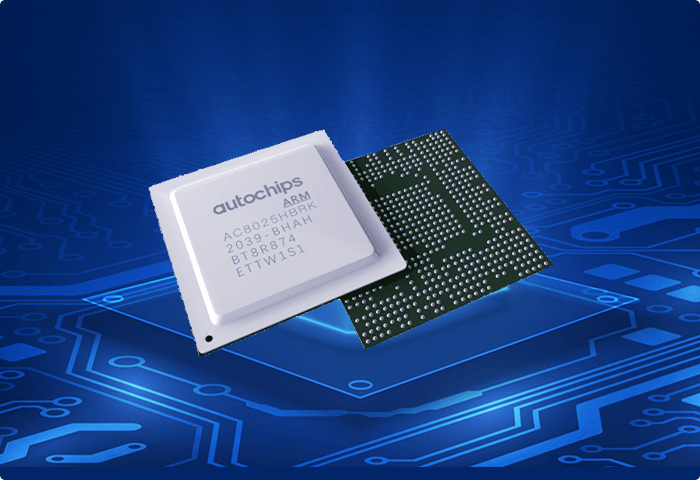
但特斯拉用数据证明了自己的底气:FSD v14版本通过引入3D高斯溅射技术,能在夜间识别150米外的行人,准确率达98.7%。在2025年6月的德国ADAC测试中,搭载FSD的Model 3在无高精地图的情况下,成功穿越了临时施工路段——系统通过分析锥桶摆放模式和工人手势,自主规划了绕行路线。这种“场景理解力”让特斯拉纯视觉方案的成本优势愈发明显:华为ADS Pro需要4颗激光雷达,而特斯拉用8颗摄像头+HW4.0芯片就实现了类似功能,硬件成本降低67%。
2025年6月,马斯克宣布“世界上第一辆自动驾驶交付汽车”完成15英里旅程时,社交媒体炸开了锅。但细看运营细节就会发现,这更像一场精心策划的科技秀:测试车辆是量产版Model Y而非无方向盘的Cybercab,副驾坐着安全员,运营区(qū)域仅(jǐn)限(xiàn)德(dé)州(zhōu)奥(ào)斯汀。更讽刺的是,当地居民在测试路段竖起了“儿童假人”抗议——他们担心系统无法识别突然冲出的行人。这种担忧并非空穴来风:2025年10月,一辆FSD测试车在加州误将白色货车识别为天空,导致追尾事故。
技术层面,特斯拉的端到端架构确实领先:FSD v13.2采用SpaceX火箭同源代码,决策速度提升2倍,能同时追踪20个动态目标。但商业落地面临三重挑战:首先是法规,中国《自动驾驶汽车运输安全服务指南》要求Robotaxi必须配备远程接管机制,而特斯拉的纯AI方案难以满足;其次是成本,Cybercab量产版虽宣称成本控制在3万美元内,但要实现盈利,每辆车需日均运营20小时以上;最后是伦理,当系统面临“电车难题”时,算法优先保护乘客还是行人?特斯拉至今未给出明确答案。
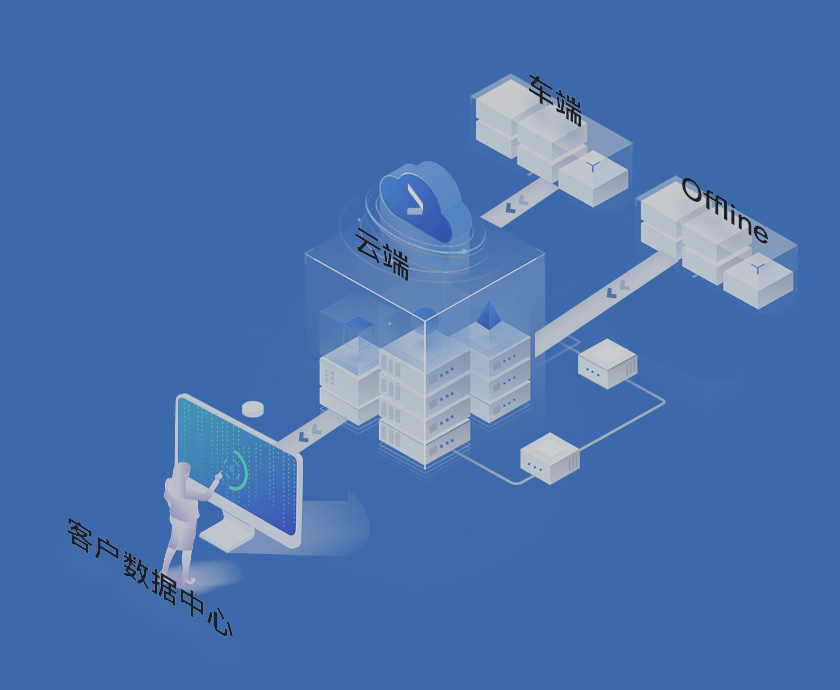
站在2025年的时间节点回望,特斯拉的自动驾驶革命已进入深水区。其核心优势在于构建了“数据-算法-硬件”的飞轮效应:每天新增的100万段驾驶视频,通过Dojo超算中心训练出更聪明的模型,再通过OTA推送给150万辆汽车,形成正向循环。这种模式让特斯拉FSD的事故率降至每1107万公里1次,优于人类驾驶员的1/900万公里。
但竞争格局正在变化:华为乾崑智驾通过车端世界模型WA,在2025年实现了“车-路-云”协同感知;小鹏XNet 2.0的视觉占用网络技术,能识别300米☎️网址外的抛洒物;理想汽车则用VLA架构让系统能解释决策逻辑——“前方车辆突然变道,系统判断其转向灯未开启,故减速保持距离”。这些技术路线都在冲击特斯拉的纯视觉霸权。更关键的是,全球监管机构开始收紧缰绳:欧盟要求自动驾驶系统必须通过ISO 21448安全认证,中国则强制要求Robotaxi配备双冗余制动系统。
或许正如马斯克在2025年AI Day上所说:“自动驾驶不是技术竞赛,而是生态战争。”当特斯拉在奥斯汀测试Robotaxi时,百度Apollo的第六代无人车已在北京亦庄完成100万公里路测;当Cybercab还在为量产挣扎时,四维图新预测的“2025年无驾驶座汽车量产”正在成为行业共识。这场革命的最终赢家,可能不是某个技术路线,而是能平衡创新与安全、效率与伦理的生态系统。对于消费者而言,或许用不了多久,我们就能像召唤网约车一样,用手机叫来一辆没有方向盘的汽车——只是那时,我们更关心的是它能否安全准时地把我们送到目的地(de),而(ér)不(bù)是(shì)它(tā)用(yòng)了(le)多(duō)少(shǎo)颗(kē)激(jī)光(guāng)雷(léi)达(dá)。













 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



