
2025-11-20 12:01:35
作者:科技
分享:


2025年(nián)的(de)自(zì)动(dòng)驾(jià)驶(shǐ)赛(sài)道(dào),德(dé)美(měi)两(liǎng)国(guó)正(zhèng)上(shàng)演(yǎn)一(yī)场(chǎng)“技(jì)术(shù)突(tū)围(wéi)战(zhàn)”。德(dé)国(guó)大(dà)众(zhòng)ID.Buzz AD在(zài)🐉汉(hàn)堡(bǎo)街(jiē)头(tóu)误(wù)入(rù)自(zì)行(xíng)车(chē)道(dào)的(de)测(cè)试(shì)视(shì)频(pín)刷(shuā)屏(píng)社(shè)交(jiāo)媒(méi)体(tǐ),美(měi)国(guó)Waymo在旧金山全无人运营车队突破500辆的新闻登上头条,这些看似矛盾的场景背后,藏着自动驾驶商业化落地的关键密码——**数据闭环与场景适配**。以德国为例,尽管大众ID.Buzz AD在测试中两次被安全员接管,但其搭载的L4级系统已能处理60km/h以下的高速场景,这背后是博世、大陆等Tier1供应商积累的数万项自动驾驶专利在支撑。而美国Waymo的“扩张术”更值得玩味:其通过与Uber合作,计划在洛杉矶投放上万辆ID.Buzz AD,用“出行平台+自动驾驶”的模式快速积累城市复杂路况数据,这种“以运营养技术”的策略,让Waymo的每辆车日均行驶里程比传统测试车高出3倍。

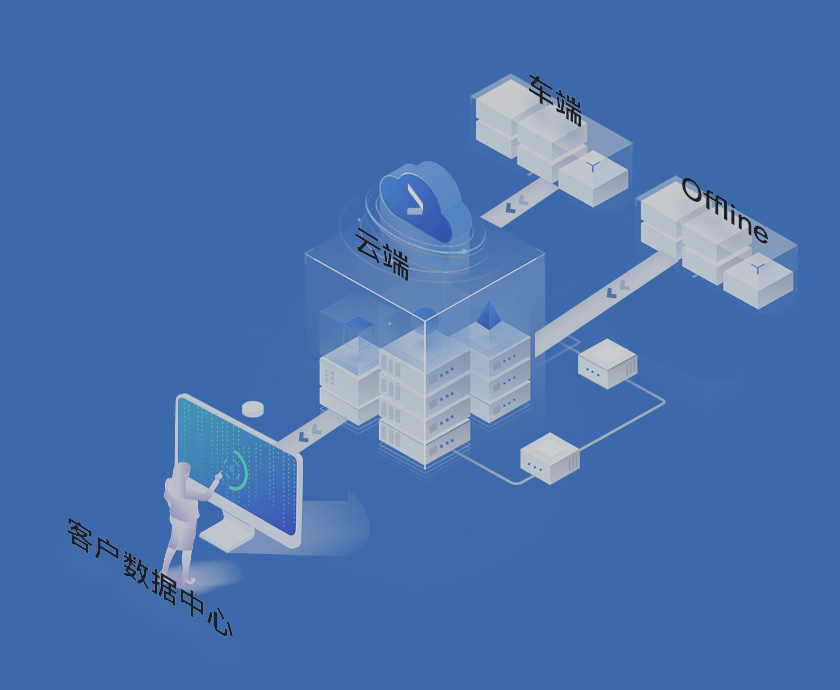
当德美车企还在为L4级落地挣扎时,中国供应商Momenta已悄然完成“技术反超”。这家成立仅8年的公司,凭借“乘用车量产+Robotaxi”的双线战略,在2025年4月官宣定点车型超130款,上车量近30万辆,更在年底实现“车端无人Robotaxi运营且不用高精地图”的突破。其核心武器是**第五代飞轮大模型**——通过乘用车收集的1000亿公里真实道路数据,训练出能处理“暴雨天无保护左转”“机械车位泊入”等长尾场景的算法,再反哺给Robotaxi实现技术上限突破。这种“数据-算法-体验”的正向循环,让Momen🍅ta成为全球十大车企中七家的合作伙伴,连福特代表都在上海车展上追问:“你们的方案与Momenta有什么不同?”更值得关注的是,Momenta计划下半年推出基于强化学习的“一段式端到端飞轮大模型R6”,这意味着自动驾驶系统将从“模块化拼接”转向“整体智能”,类似ChatGPT从GPT-3到GPT-4的质变。
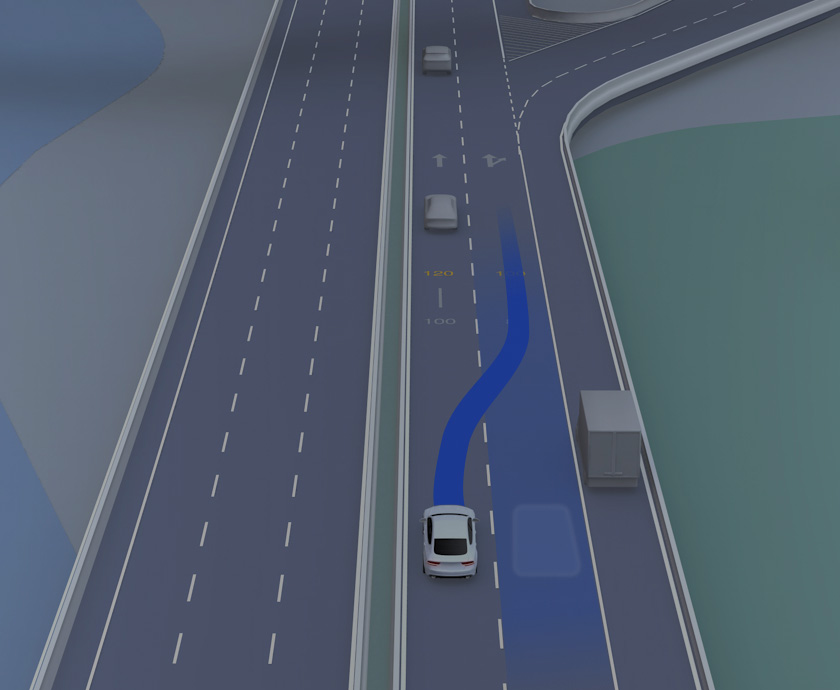
德美自动驾驶的突破,本质是技术路线的博弈。德国车企如奔驰,坚持“激光雷达+高精地图”的“重感知”路线,其L3级Drive Pilot系统需依赖厘米级地图实现60km/h以下的自动驾驶;而美国特斯拉则押注“纯视觉+神经网络”的“轻感知”路线,通过8摄像头+FSD芯片的组合,试图用算法弥补硬件短板。中国方案则走出第三条路——Momenta的“量产车+低成本传感器”策略,用12个摄像头+5个毫米波雷达的组合,在20万元级车型上实现城市NOA(导航辅助驾驶),这种“科技平权”让高阶智驾渗透率从2025年的8%跃升至2025年的15%。个人经验来看,我曾试驾过搭载Momenta方案的小鹏P7+,其“车位到车位”的全场景D2D功能,能自动通过地库闸机、🎭网址识别施工路段并规划绕行,这种“无感切换”的体验,已接近人类驾驶员水平。
2025年或将成为自动驾驶的“分水岭”。据行业预测,L4级智能驾驶将开启“场景深化+范围扩张”新阶段:车路云一体化将在工业园区、矿区等封闭场景实现规模化落地,通过路侧感知设备与云端算力的联动,解决单车智能在极端天气下的感知盲区;而乘用车领域,L2+高阶智驾将下探至10万元级市场,比📀网址亚迪海鸥等平价车型已宣布搭载高速NOA功能。更值得期待的是,随着Momenta R6大模型的推出,自动驾驶系统或将实现“一段式端到端”决策,即从感知到控制全部由一个神经网络完成,彻底摆脱对规则代码的依赖。这不仅是技术突破,更是产业生态的重构——当自动驾驶从“功能配置”升级为“系统平台”,车企与供应商的关系将从“买卖硬件”转向“联合研发”,而中国供应商凭借数据积累和算法优势,正从“跟随者”变为“规则制定者”。













 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



