
2025-11-15 04:01:46
作者:科技
分享:


“听说自动驾驶比人类开车安全80%?这是真的吗?”2025年9月,北京亦庄的Robotaxi(自动驾驶出租车)运营区,一位体验过全无人驾驶的乘客向安全员抛出这个问题。答案或许藏在数据里:某车企公布的辅助驾驶系统数据显示,启用该功能的车辆平均每行驶669万英里才会发生一次事故,而人类驾驶员在🌲入口美国的平均事故间隔仅为49.9万英里。更直观的是,美国国家公路交通安全管理局(NHTSA)统计,94%的交通事故由人为失误引发,而自动驾驶系统理论上能规避疲劳、分心、酒驾等致命(mìng)因(yīn)素(sù)。
但(dàn)“安(ān)全神(shén)话”并非无懈可击。2025年Uber自动驾驶测试车在亚利桑那州撞死行人,2025年某品牌L4级车辆在暴雨中因激光雷达失效追尾前车……这些案例揭示了一个残酷现实:自动驾驶的安全是“相对安全”,而非“绝对安全”。它的核心优势在于用算法替代人类的不稳(wěn)定(dìng)因(yīn)素,但技术漏洞、伦理困境和法规空白,仍是横亘在“零事故”目标前的三座大山。
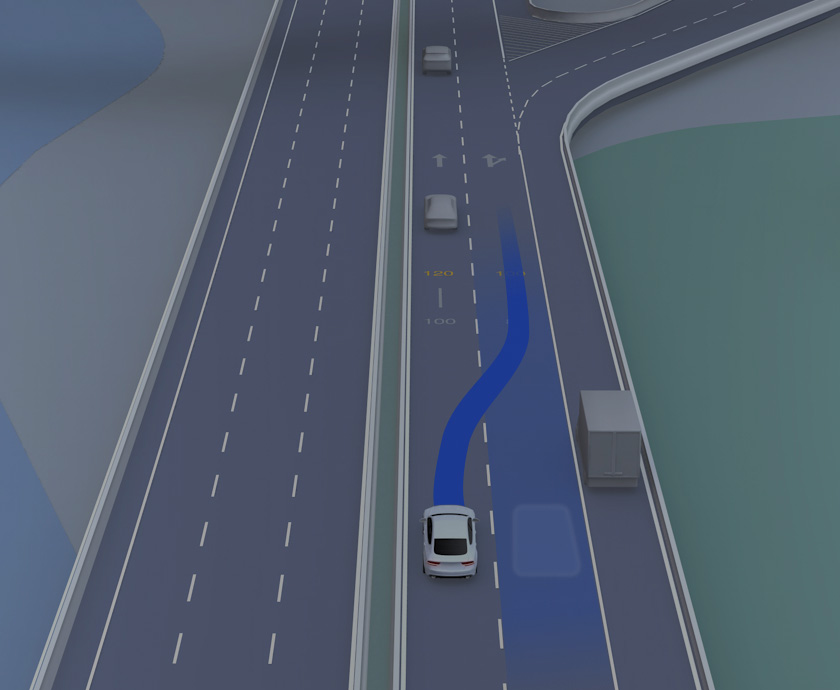
自动驾驶的“眼睛”由摄像头、毫米波雷达和激光雷达(LiDAR)组成,但这些传感器在极端天气下会集体“失明”。例如,暴雨中摄像头的画(huà)面(miàn)会(huì)模糊成水墨画,激光雷达的点云数据可能被雨滴干扰,导致系统误判障碍物距离。2025年某测试机构的数据显示,在浓雾环境下,自动驾驶系统的物体识别准确率从晴天的98%骤降至72%,紧急制动响应时间延长0.8秒——这0.8秒,足以让车辆从“可避免碰撞”变成“致命撞击”。
多传感器融合技术被视为解决方案,但“1+1+1>3”的愿景尚未完全实现。特斯拉坚持纯视觉方案,依赖摄像头和神经网络;而Waymo、百度Apollo等企业采用“摄像头+雷达+LiDAR”的冗余设计。两种路线各有利弊:纯视觉成本低,但依赖海量数据训练;多传感器成本高,但能弥补单一传感器的缺陷。2025年7月,小鹏汽车发布的XNGP🌽 5.0系统尝试“折中方案”——用高精度摄像头为主,激光雷达作为“安全备份”,在夜间无灯路段成功识别突然窜出的电动自行车,避免了一场潜在事故。
如果必须选择撞向行人还是撞向护栏,自动驾驶系统该如何决策?这个经典的“电车难题”,在2025年9月引爆了一场伦理争议。某科技公司公布的决策算法显示,其系统会优先保护车内乘客生命安全,这一逻辑被批评为“将风险转嫁给外部”。而麻省理工学院2025年的调研显示,62%的受访者希望自动驾驶车在不可避免的碰撞中“最小化伤害”,而非“保护己方”。
伦理困境的背后,是法律责任的模糊地带。2025年4月,上海一起L3级自动驾驶事故中,系统因未识别施工路段的路障导致追尾,但车企、软件供应商和驾驶员均声称“不应担责”。目前,全球仅有德国、中国等少数国家在法规中明确“L3级事故由驾驶员承担最终责任”,而L4级以上的责任划分仍是空白。正如清华大学汽车工程系教授李克强所言:“自动驾驶的伦理问题,本质是技术、法律和人类价值观的碰🎲入口撞,需要跨学科协作才能破解。”
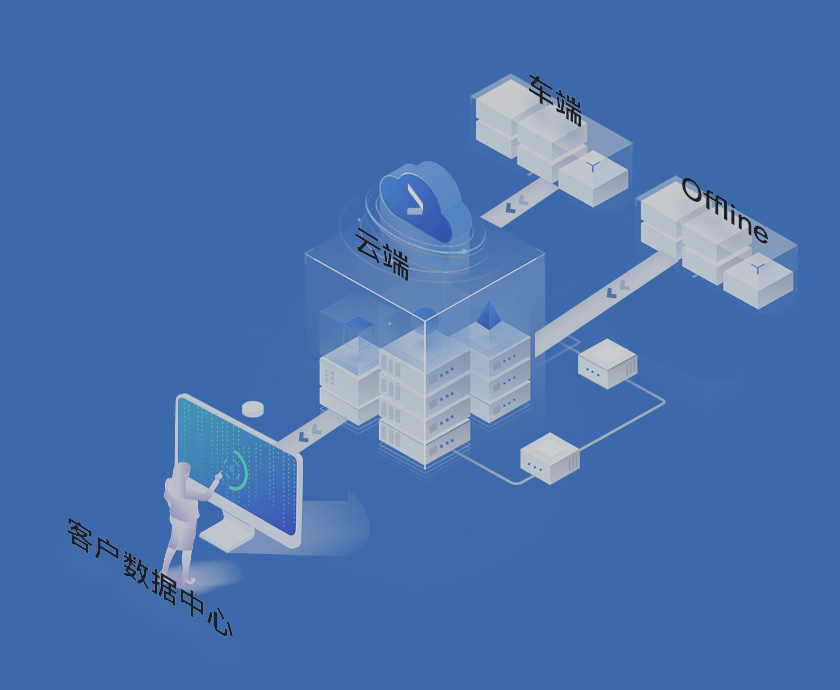
一辆自动驾驶车每天产生4TB数据,相当于200万张高清照片。这些数据包含车辆轨迹、行人影像、道路环境等敏感信息,一旦泄露,后果不堪设想。2025年4月,某国际车企因数据跨境传输违规被罚款1.2亿元,暴露了行业的数据合规痛点。
数据安全的核心挑战在于“平衡创新与风险”。高精地图涉及国家地理安全,必须与具备甲级资质的图商合作;生物识别数据(如车内摄像头捕捉的乘客面部信息)需严格脱敏。中国2025年出台的《智能汽车基础地图数据传输保护技术规范》明确要求:地图数据必须加密存储,跨境传输需通过安全评估。而在技术层面,车企正探索“数据最小化”原则——只收集必要数据,并在本地完成处理,避免敏感信息上传云端。
2025年的自动驾驶赛道,呈现出“L2狂奔、L4破局”的格局:L2级辅助驾驶渗透率从2025年的51%飙升至59%,10万元级车型开始标配自适应巡航;L4级Robotaxi在北京、上海等城市实现24小时纯无人运营,百度萝卜快跑二季度服务次数超220万次,成为全球最大自动驾驶出行平台。但专家预测,L5级全自动驾驶(无方向盘、无安全员)至少需等到2025年,核心瓶颈在于“长尾场景”的覆盖——例如,如何识别中国乡村道路上突然出现的牛群?如何在没有车道线的施工路段自主规划路径?
不过,希望正在萌芽。2025年8月,人民论坛网报道,多模态大模型和端到端学习技术正推动自动驾驶从“规则驱动”转向“数据驱动”。例如,特斯拉的FSD V12系统通过10亿💰英里真实数据训练,能在无高精地图的路段自主决策;百度Apollo的“世界模型”可模拟百万种极端场景,提升系统鲁棒性。正如Waymo联合创始人克里斯·厄姆森所说:“自动驾驶的安全不是‘达到某个标准’,而是‘持续超越人类’。”
站在2025年的节点回望,自动驾驶的安全之路恰似一场“无限游戏”:技术不断突破边界,法规逐步填补空白,公众信任在争议中积累。或许,我们不必纠结于“它是否绝对安全”,而应关注“它是否比人类更安全”。毕竟,从飞机自动驾驶到工业机器人,每一次技术革命都曾经历质疑,但最终都重塑了人类的生活方式。自动驾驶的未来,终将由数据、算法和人类共同书写。













 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



