
2025-11-13 04:01:49
作者:科技
分享:


2025年,北京亦庄的自动驾驶示范区里,一辆辆没有方向盘的Robotaxi穿梭如织,乘客们刷着手机,任由车辆自主完成变道、避让甚至处理“鬼探头”等极端场景。这背后,是自动驾驶仪从“辅助驾驶”向“全无人驾(jià)驶(shǐ)”的(de)跨(kuà)越(yuè)式(shì)进(jìn)化(huà)。但(dàn)技(jì)术(shù)狂(kuáng)欢(huan)的(de)背(bèi)后(hòu),安(ān)全始(shǐ)终(zhōng)是(shì)悬(xuán)在(zài)头(tóu)顶(dǐng)的(de)达(dá)摩(mó)克(kè)利(lì)斯(sī)之(zhī)剑(jiàn)。据(jù)统(tǒng)计(jì),90%的(de)交(jiāo)通(tōng)事(shì)故(gù)源(yuán)于(yú)人(rén)为(wèi)失(shī)误(wù),而(ér)自(zì)动(dòng)驾(jià)驶(shǐ)仪(yí)的(de)终(zhōng)极(jí)目(mù)标(biāo),正(zhèng)是(shì)用(yòng)机(jī)器(qì)的(de)“零(líng)疲(pí)劳(láo)”替(tì)代(dài)人(rén)类(lèi)的(de)“不(bù)确(què)定(dìng)性(xìng)”。不(bù)过(guò),当(dāng)特(tè)斯(sī)拉(lā)FSD系(xì)统(tǒng)因(yīn)传(chuán)感(gǎn)器(qì)误(wù)判(pàn)将(jiāng)路肩(jiān)阴(yīn)影(yǐng)当(dāng)作(zuò)车(chē)道(dào)线(xiàn)导(dǎo)致冲撞,当小鹏端到端模型在暴雨中因激光雷达点云噪声做出危🐞险决策,我们不得不追问:自动驾驶仪的安全,究竟靠什么保障?
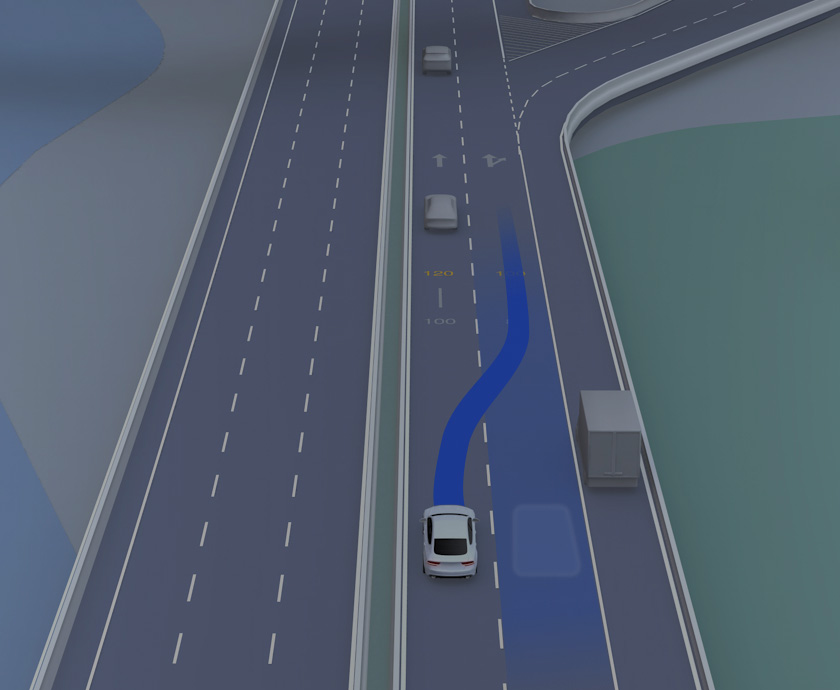
传统自动驾驶仪依赖“感知-决策-执行”的模块化架构,每个模块像流水线工人般完成特定任务。但2025年(nián)的(de)端(duān)到(dào)端(duān)大(dà)模(mó)型(xíng),彻(chè)底(dǐ)颠(diān)覆(fù)了(le)这(zhè)一(yī)逻(luó)辑(ji)——它(tā)直(zhí)接(jiē)将(jiāng)摄(shè)像(xiàng)头(tóu)、雷(léi)达(dá)的(de)原(yuán)始(shǐ)数据“喂”给神经网络,通过海量真实道路数据训练出“直觉式”决策能力。特斯拉FSD V12系统已能处理99%的常规场景,华为ADS 3.0在“鬼探头”测试中事故率比人类低40%,这些数据背后,是每辆L4级自动驾驶车每秒产生超1TB数据的“数据洪流”。
但数据并非万能。2025年9月,山西高速上一辆开启辅助驾驶的轿车因驾驶员睡着撞上护栏,暴露出“辅助≠自动”的认知鸿沟。更严峻的是,端到端模型的“黑盒特性”让安全可解释性成为难题——当模型在夜间将反光路标误判为障碍物时,工程师甚至无法定位具体是哪层神经元出了错。对此,行业正通过“动态攻击面监控”技术,用AI实时检测模型决策异常,误报率需低于0.01%,试图在数据狂奔中套上“安全缰绳”。
2025年的自动驾驶仪,早已不是“一个摄像头+一个算法”的简单组合。以华为问界M9为例,其搭载的ADS 3.0系统采用“激光雷达+摄像头+毫米波雷达”的三重感知冗余,即使某一传感器失效,剩余模块仍能通过V2X车路协同获取路况信息。更关键的是,线控底盘的“双备份”设计——当主执行机构故障时,备用系统可在0.1秒内接管,确保车辆稳态运行。
硬件安全还延伸到供应链层面。2025年1-5月,中国自动驾驶仪进口量同比下降99.53%,国产激光雷达(如禾赛科技AT128)成本降至500美元以下,国产AI芯片(如地平线征程6)算力达512TOPS,彻底摆脱对博世、大陆等外资供应商的依赖。这种“全栈自研”不仅降低了成本,更让安全可控性大幅提升——当某外资芯片被曝出存在硬件木马漏洞时,国产芯片已通过TARA威胁分析覆盖“芯片-算法-通信”三维攻击树,从源头筑牢安全防线。
2025年4月,北京率先实施《自动驾驶汽车条例》,明确L3级车辆在自动驾驶状态下发生事故时,若系统未及时预警,车企需承担主要赔偿责任。这一“责任转移”条款,倒逼企业将安全测试里程从百万级提升至千万级——百度Apollo的L4级Robotaxi在复杂天气下的接管频次较2025年下降78%,正是长期路测的成果。
但法规的滞后性仍是一大挑战。当深圳允许L4级车辆在全市域开放测试时,如何界定“系统决策边界”成为难题——例如,在“电车难题”场景中,车辆应优先保护乘客还是行人?对此,欧盟计划将UNECE R155与ISO 21434标准合并,要求车企实现“🍆【】72小时漏洞修复+24小时监管报告”机制,而中国《汽车数据安全管理条例》则强制要求自动驾驶数据本地化存储,防止跨境数据泄露。这些制度设计,正在为自动驾驶仪的安全划定“法律红线”。
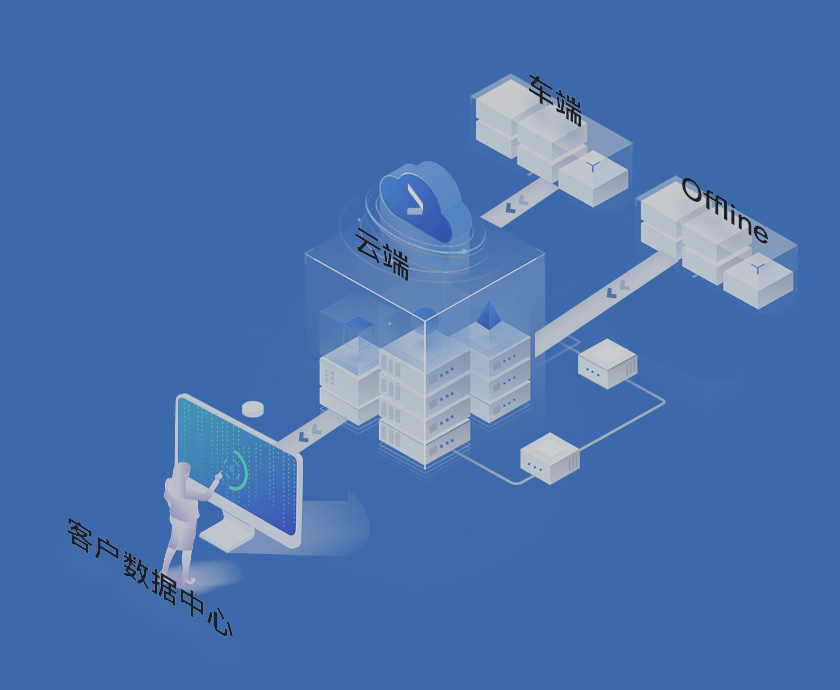
2025年的自动驾驶仪,早已不是“孤军奋战”。在广州,文远知行的Robotaxi通过“5G-V2X”与路侧单元(RSU)实时通信,获取前方3公里的交通信号灯状态;在上海,华为与上汽合作的“车路云一体化🎨”项目,让车辆能提前预判施工路段风险。这种“单车智能+路端感知+云端决策”的融合模式,正在将安全从“车辆维度”提升到“系统维度”。
更值得期待的是,随着量子安全通信技术的落地,中国信通院已建成全球首个车用量子密钥分发试验网,100辆L4级自动驾驶汽车在合肥实现抗量子破解通信。这意味着,未来的自动驾驶仪不仅能“看得清”“算得快”,更能“防得住”——当黑客试图通过伪造RSU信号诱导车辆时,量子加密技术能在毫秒级完成密钥更新,让攻击无处下手。
自动驾驶仪的安全之探,本质是一场“技术-制度-伦理”的三重博弈。从特斯拉FSD的“数据狂奔”到华为ADS的“冗余设计”,从北京的“责任立法”到广州的“车路协同”,我们看到的不仅是技术的突破,更是人类对“移动生存权”的重新定义。或许在不远的未来,当我们的孩子坐在无人车里问“方向盘是什么”时,我们会想起2025年这个关键节📞【】点——那一年,安全不再是自动驾驶仪的“附加题”,而是刻进技术基因的“必答题”。













 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



