
2025-11-09 12:01:47
作者:科技
分享:


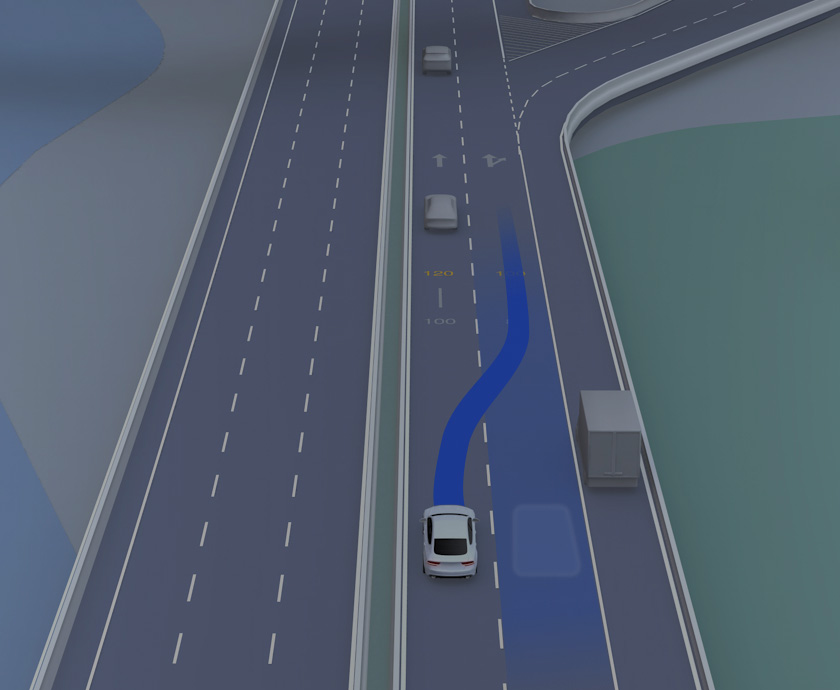
想象一下,你坐在一辆没有方向盘的汽车里,它却能精准识别红绿灯、避让行人,甚至在暴雨中自动调整车速——这一切的背后,是自动驾驶视觉技术的“魔法”。作为自动驾驶的核心感知模块,视觉技术通过摄像头和算法,让汽车像人类一样“看”清环境,但它的能力远超人类:每秒处理数百万像素数据,识别数百种物体,甚至能预测未来3秒的轨迹。以特斯拉为例,其FSD系统通过8个摄像头覆盖360度视野,结合神经网络实时生成三维环境模型,这种“纯视觉路线”已在全球数百万辆车上验证了可行性。🐸网址不过,视觉技术并非完美无缺——强光下可能误判白色货车为天空,雨雾中图像清晰度骤降60%,这些挑战正推动着技术不断进化。

2025年,自动驾驶领域最激烈的争论莫过于“纯视觉能否取代激光雷达”。支持者如马斯克认为,摄像头成本仅为激光雷达的1/10,且通过海量数据训练,视觉算法已能媲美激光雷达的测距精度。例如,极越汽车的BEV+Transformer方案利用OCC(占用网络)技术,通过2D图像生成3D体素地图,精准识别异形障碍物,解决了传统视觉方案的空间高度信息缺失问题。但反对者指出,激光雷达在低光照和恶劣天气下的可靠性无可替代——谷歌Waymo的测试显示,雨雪天气中激光雷达的识别准🍒网址确率仍保持在85%以上,而纯视觉方案可能降至70%以下。目前,多数车企选择“折中方案”:百度Apollo系统结合摄像头、激光雷达和毫米波雷达,通过多传感器融合提升安全性,尽管成本增加30%,但事故率降低了45%。这场博弈的本质,是技术普及与极端场景安全的平衡。
视觉技术的进化,本质是算法对环境理解的深度提升。第一大突破是**BEV(鸟瞰图)视角**:传统摄像头数据是平面视角,而BEV通过空间变换将多摄像头画面融合为俯视图,让汽车“俯视”周围环境。例如,小鹏汽车的XNGP系统利用BEV生成动态地图,在复杂路口的决策准确率提升20%。第二大突破是**OCC占用网络**:传统视觉方案依赖物体类别识别,而OCC直接判断空间是否被占用。2025年CVPR会议上,SelfOcc等论文展示了纯视觉方案如何通过自监督学习生成3D占用网格,精准识别未知障碍物,甚至能区分“施工锥桶”和“堆积的落叶”。第三大突破是**端到端算法**:传统自动驾驶系统分为感知、规划、控制多个模块,而端到端算法直接从图像生成控制指令。2025年,NVIDIA的BEV-Planner和清华大学的PlanKD等研究证明,端到端方案能减少30%的计算延迟,让汽车反应更像人类驾驶员。
尽管视觉技术突飞猛进,但三大挑战仍待解决。首先是**数据依赖**:特斯拉通过全球车队收集了10亿英里真实数据,但极端场景(如暴雨中的无标线乡村道路)数据仍稀缺。2025年,Waymo在旧金山模拟了10万次暴雨场景测试,发现视觉算法在积水路面的误判率高达15%。其次是**算力瓶颈**:纯视觉方案需通过2D图像重建3D环境,算力需求是激光雷达方案的5倍。英伟达Orin芯片的算力为254TOP🌍S,但处理8K摄像头数据时仍需优化。最后是**伦理困境**:当视觉系统必须选择“撞向护栏”还是“撞向行人”时,算法如何决策?2025年,IEEE发布了首部自动驾驶伦理准则,要求算法优先保障人类生命安全,但具体实施仍需法律和技术的双重突破。
站在2025年的节点,视觉技术正推动自动驾驶从“辅助驾驶”向“完全无人”跨越。极越汽车宣布,其纯视觉方案🔥已实现“周更”算法迭代,系统能力每3个月提升(shēng)一(yī)倍(bèi);百(bǎi)度(dù)Apollo在(zài)武(wǔ)汉(hàn)开(kāi)放(fàng)了(le)全无(wú)人(rén)驾(jià)驶(shǐ)出(chū)租(zū)车(chē)服(fú)务(wu),单(dān)日(rì)订(dìng)单(dān)量(liàng)突(tū)破(pò)1万(wàn)次(cì)。更(gèng)值(zhí)得(de)期(qī)待(dài)的(de)是(shì),视(shì)觉(jué)技(jì)术(shù)与(yǔ)大(dà)语(yǔ)言(yán)模(mó)型(xíng)的(de)融(róng)合(hé)——2025年(nián)CVPR上(shàng),LMDrive等(děng)研(yán)究(jiū)展(zhǎn)示(shì)了(le)如何通过自然语言指令控制汽车(如“绕过前面的卡车”),让自动驾驶更接近人类驾驶的灵活性。或许用不了多久,我们的孩子会惊讶于“爸爸居然需要自己开车”,而视觉技术,正是这场出行革命的起点。













 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



