
2025-10-19 20:01:48
作者:科技
分享:


### 特斯拉自🔵登录动驾驶技术革新
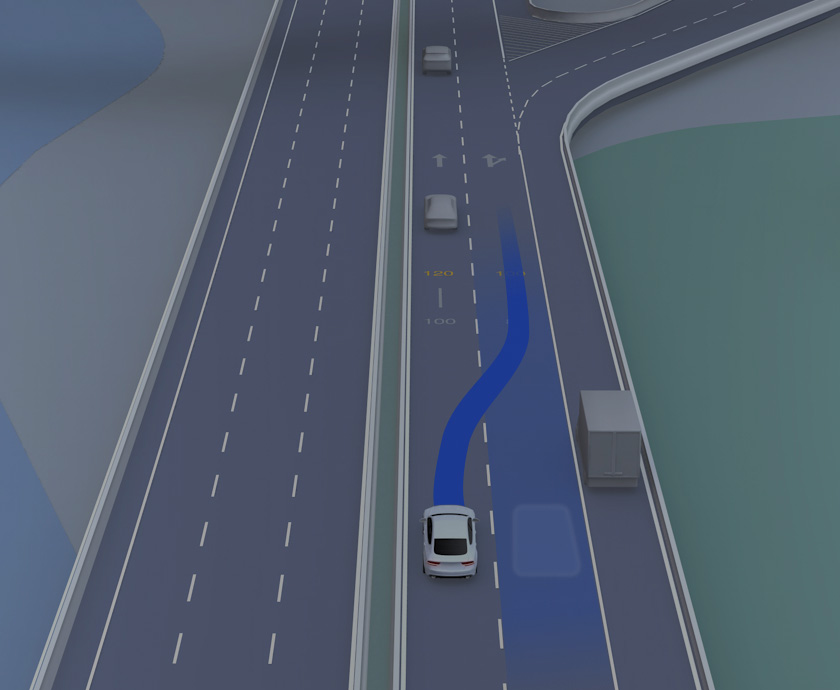
特斯拉在自动驾驶领域的技术革新最为人称道的就是其独特的纯视觉方案。这一方案摒弃了激光雷达和高精度地图的使用,完全依赖摄像头进行环境感知。特斯拉的车辆配备了多达12个摄像头(在HW4.0硬件版本中),这些摄像头覆盖车辆的前方、后方及左右两侧,通过协作实时收集环境数据。这种纯视觉方案的基础在于对人类视觉系统的模(mó)仿(fǎng),通(tōng)过(guò)摄(shè)像(xiàng)头(tóu)和(hé)神(shén)经(jīng)网(wǎng)络(luò)模(mó)拟(nǐ)人(rén)类(lèi)驾(jià)驶(shǐ)员(yuán)依(yī)靠(kào)眼(yǎn)睛(jing)和(hé)大(dà)脑(nǎo)对(duì)环(huán)境(jìng)的(de)感(gǎn)知(zhī)与(yǔ)决(jué)策(cè)过(guò)程(chéng)。根(gēn)据(jù)特(tè)斯(sī)拉(lā)的(de)官(guān)方(fāng)数(shù)据(jù),其(qí)FSD(Full Self-Driving)系(xì)统(tǒng)已(yǐ)经(jīng)通(tōng)过(guò)超(chāo)过(guò)110亿(yì)英(yīng)里(lǐ)的(de)实(shí)际路测数据进行训练,实现了基于BEV(鸟瞰图)的3D场景重建。

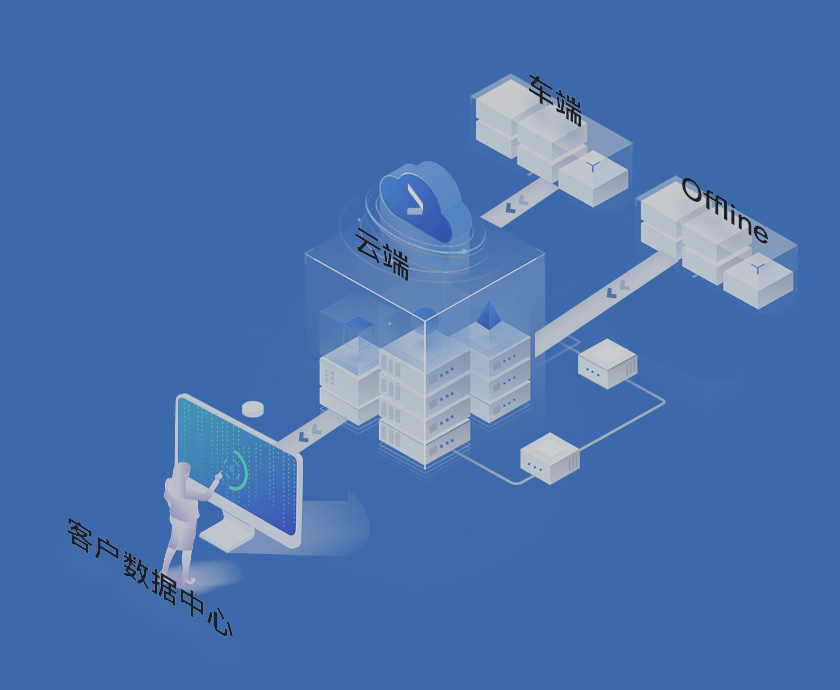
特斯拉自动驾驶技术的另一大革新是从规则驱动向数据驱动的转变。传统的自动驾驶系统🍎依赖于大量的规则编写和手工标注来实现感知和决策,但这种方法在处理复杂多变的道路场景时显得力不从心。特斯拉则采用了端到端的神经网络架构,通过大量真实驾驶场景中的数据不断优化其神经网络模型。这一转变使得特斯拉的FSD系统在处理复杂场景时更加灵活和准确。例如,FSD V12版本就标志着全球首个端到端神经网络量产上车,从数据输入到决策输出的整个过程都由神经网络完成。据特斯拉CEO埃隆·马斯克表示,FSD V12需要人工干预的频率只有FSD V11的百分之一。
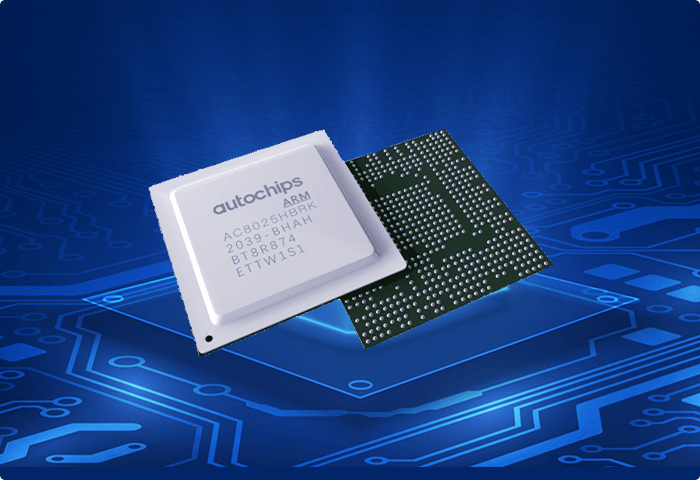
特斯拉自动驾驶技术的革新还体现在其硬件迭代与软件优化的协同演进上。从2025年的HW1.0到2025年的HW4.0,特斯拉的自动驾驶硬件平台经历了多次迭代升级,显著提升了计算能力、摄像头的数量和系统的感知能力。在HW4.0版本中,特斯拉不仅延续了纯视觉方案的核心理念,还进一步增强了摄像头的感知能力,像素从120万提升至500万,探测距离达到424米。此外,特斯拉还重新引入了高精度4D毫米波雷达,以弥补纯视觉方案在极端天气或复杂光照条件下的局限性。这种硬件与软件的协同演进,使得特斯拉的FSD系统能够在不断优化的同时,保持其技术的领先性和市场竞争力。
除了上述主要点外,特斯拉自动驾驶技术的革新还引发了一些延展性的内容分析。例如,特斯拉的纯视觉方案虽然降低了硬件成本,但也在一定程度上引发了关于安全性的讨论。一些用户反馈,在极端天气或复杂场景下,特斯拉的FSD系统可能会出现误判或延迟决策的情况。然而,特斯拉通过不断的数据收集和🍭登录算法优化,正在逐步解决这些问题。此外,特斯拉的自动驾驶技术还面临着法律法规和伦理道德的双重挑战。如何在保证安全的前提下,实现自动驾驶技术的合法合规使用,是特斯拉和整个自动驾驶行业都需要思考的问题。
总的来说,特斯拉自动驾驶技术的革新不仅体现在其独特的技术路径上,还体现在其从规则驱动向数据驱动的转🚀变,以及硬件迭代与软件优化的协同演进上。这些革新使得特斯拉在自动驾驶领域保持了领先地位,也为整个行业的发展提供了有益的借鉴和启示。随着技术的不断进步和法律法规的逐步完善,我们有理由相信,自动驾驶技术将在未来为人们的出行带来更多便利和安全。













 邮箱:kaiyuncom@qiao-yue.com
邮箱:kaiyuncom@qiao-yue.com



